Oi pessoal,
sou novo aqui e na criação de engenhocas automatizadas, então espero estar postando no local certo do fórum e que me desculpem perguntas muito básicas.
Estou tentando montar uma pequena estrutura para girar e parar em pontos pré-determinados uma pequena câmera gopro. Pensei em usar um motor de passos com um arduino nano. O peso é relevante, a coisa tem que ficar o mais leve possível, pois tem que ser levantada num pequeno quadcóptero (DJI Phantom). Como não consegui o motor de passos tentei com um DC que tinha de uma impressora velha, mas não deu certo. Só depois de montar me toquei que a estrutura não ficará estável na horizontal, e esse motor não vai evitar o giro numa possível inclinação de talvez até uns 10 ou 20 graus.
Bom, vejam a estrutura montada:
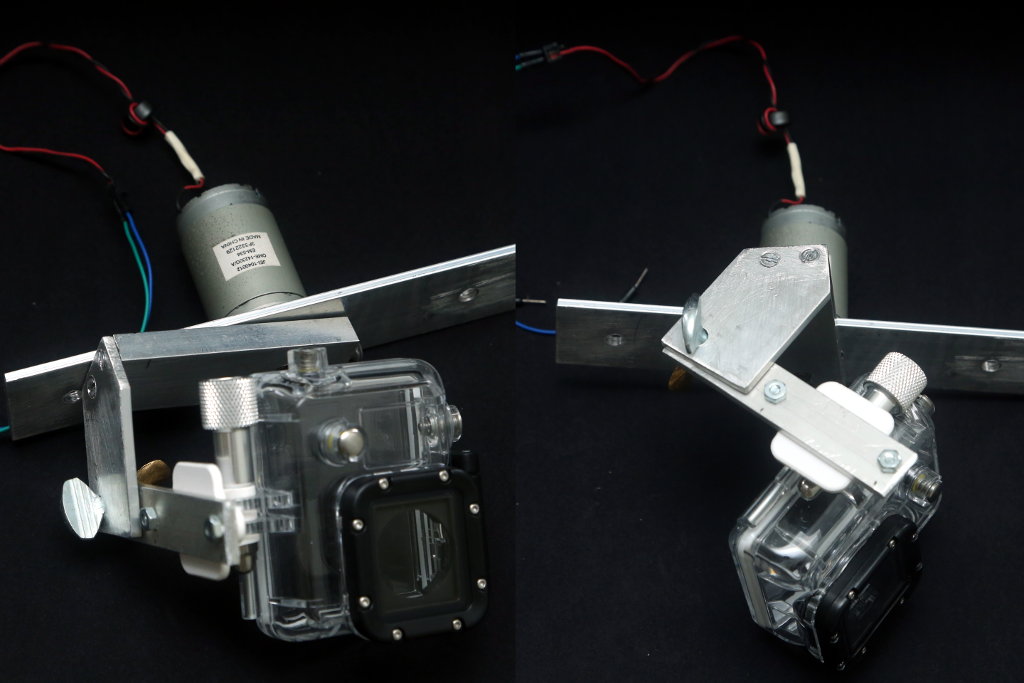
Dúvidas num projeto para girar uma câmera - arduino + motor
Nesse momento eu simplesmente quero que a câmera gire aproximadamente 45 graus a cada 3s e pare depois de 2 voltas. A programação no arduino é tranquila. Minhas dúvidas são na parte do circuito e motor.
1) Um motor de passos vai conseguir manter a posição da câmera durante os 3s mesmo com o conjunto instável?
Nunca operei um motor de passos, mas imagino que sim e que a capacidade de torque tem que ser considerada pra isso. A instabilidade deve ser uma inclinação de talvez até uns 20 graus no conjunto. A câmera pesa 140g e tem ainda as partes de alumínio que giram junto - mais uns 150g no máximo eu chutaria.
2) Com o que apresentei até aqui podem me recomendar um motor e onde comprar? Vi que alguns por aqui vendem.
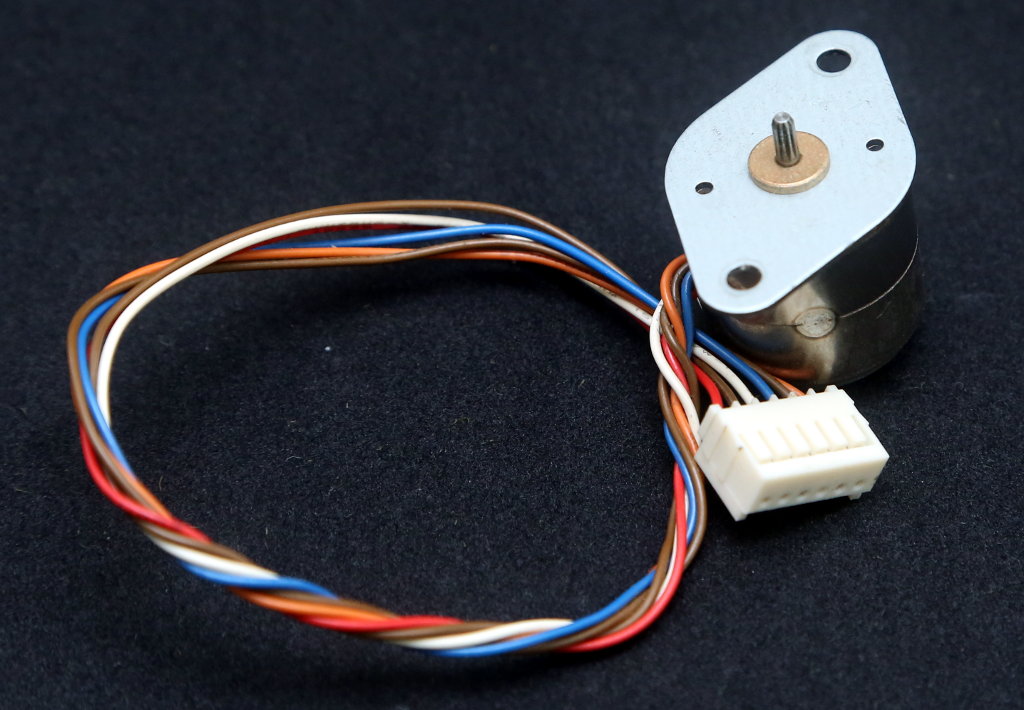
Tenho um pequeno motor de passos aqui, mas não sei operá-lo e não tenho uma daquelas plaquinhas com um driver:
Dúvidas num projeto para girar uma câmera - arduino + motor
Não tem nada escrito nele. Os fios são vermelho, marrom, branco, azul, marrom e laranja.
3) Esse motor tem pinta de que aguenta o tranco? Se sim, consigo operá-lo só com o arduino? Podem me ajudar?
Desde já obrigado por qualquer apoio.
PS: não manjo de questões talvez óbvias do desenho do circuito. O motor DC, por exemplo, testei ligando direto no arduino, com certo medo. Acho que talvez devesse ligá-lo via relé ou botar alguns componentes pra não queimar o arduino, mas me falta conhecimento, então agradeço se não pouparem tais dicas "óbvias"

.
Abs, Cartola.

 Tópico: Dúvidas num projeto para girar uma câmera - arduino + motor (Lida 4836 vezes)
Tópico: Dúvidas num projeto para girar uma câmera - arduino + motor (Lida 4836 vezes)